 KUKA - KR 1000 Titan
KUKA - KR 1000 TitanKUKA KR 1000 Titan: Самый мощный серийный робот KUKA. Поднимает до 1000 кг, вылет 3200 мм. Для самых тяжелых промышленных задач.
 KUKA - KR 120 R2700 extra
KUKA - KR 120 R2700 extraРобот KUKA KR 120 R2700 extra предлагает 120 кг полезной нагрузки и радиус 2696 мм для точных операций в производстве.
 KUKA - KR 16 R2010
KUKA - KR 16 R2010KUKA KR 16 R2010: Высокоточный робот с вылетом 2010 мм и нагрузкой 16 кг для универсальных промышленных задач.
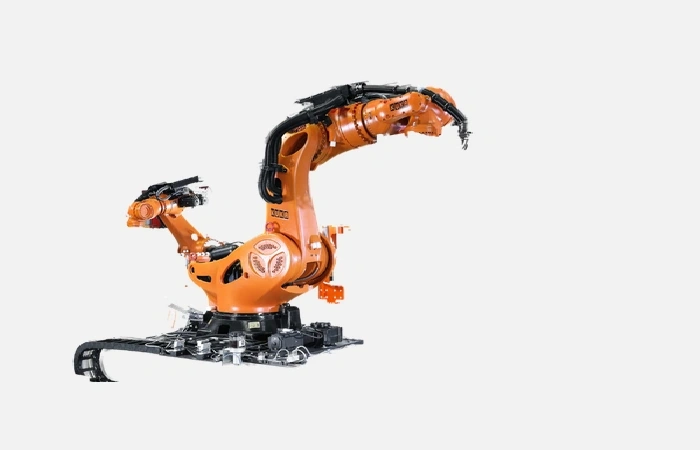
 KUKA - KR 210 R2700 prime
KUKA - KR 210 R2700 primeKUKA KR 210 R2700 prime: надежный 6-осевой робот с грузоподъемностью 210 кг и вылетом 2700 мм для тяжелых промышленных задач.
 KUKA - KR 360 FORTEC
KUKA - KR 360 FORTECМощный робот KUKA KR 360 FORTEC для тяжёлых нагрузок до 360 кг. Обеспечивает высокую точность и надёжность в промышленных задачах.
 KUKA - KR 500 FORTEC
KUKA - KR 500 FORTECМощный KUKA KR 500 FORTEC: 500 кг полезной нагрузки и 2850 мм радиус действия для тяжелых промышленных задач.
 KUKA - KR 6 R700 sixx
KUKA - KR 6 R700 sixxКомпактный робот KUKA KR 6 R700 sixx для точных задач с грузоподъемностью 6 кг и вылетом 706 мм, идеален для сборки.
 KUKA - KR 60 HA
KUKA - KR 60 HAKUKA KR 60 HA обеспечивает высокоточное выполнение задач с полезной нагрузкой до 60 кг, идеален для автоматизации производства.
KUKA - KR 70 R2100 IONTECKUKA KR 70 R2100 IONTEC – универсальный робот с грузоподъемностью 70 кг и вылетом 2100 мм для точных производственных задач.
 KUKA - KR 700 PA
KUKA - KR 700 PAРобот KUKA KR 700 PA для высокоскоростной паллетизации тяжёлых грузов до 700 кг. Оптимизирован для логистики и производства.
 KUKA - KR QUANTEC K
KUKA - KR QUANTEC KKUKA KR QUANTEC K: Высокопроизводительный робот для широкого спектра задач, обеспечивающий точность и надежность в производстве.
Роботы-манипуляторы в металлообработке давно перестали быть экзотикой и превратились в норму современного цеха. По данным Международной федерации робототехники IFR за 2023 год, в России уже более 43 % новых линий сварки, резки и палетизации оснащаются промышленными роботами. Основное назначение этой категории оборудования — автоматизированный захват и перемещение заготовок, инструментов или готовых деталей с микронной точностью, что непосредственно влияет на выработку и стабильность качества.
Для предприятий, работающих с листовым и сортовым прокатом, робот-манипулятор способен заменить целую группу вспомогательных станков и большинство ручных операций. Он подает детали к лазерному станку, удерживает их под углом при сварке, снимает готовые корпуса с конвейера и укладывает их на палеты без риска деформации кромок. В автоматических гибочных ячейках робот сокращает цикл до 5-7 секунд на штамп, что подтверждено испытаниями НИЦ МГТУ «Станкин» в 2022 году.
Современные шести- и семиосевые конструкции обеспечивают свободу движения, недоступную механизированным захватам прошлого поколения. Дополнительная ось, установленная в основании, расширяет рабочий конус до 360°, позволяя обслуживать сразу две технологические зоны, например, токарный и фрезерный обрабатывающие центры. Инструментальная оснастка включает вакуумные присоски для листа толщиной до 20 мм, магнитные грейферы для поковок весом 150 кг и прецизионные цанги, рассчитанные на посадочный диаметр 6-32 мм. Благодаря унифицированным фланцам ISO 9409-1 смена захвата занимает меньше 90 секунд и выполняется без разгерметизации пневмосети.
Подбирая манипулятор, технолог ориентируется на четыре базовых показателя.
Перед перечислением этих характеристик стоит подчеркнуть, что каждый из них влияет сразу на несколько аспектов эксплуатации — от времени цикла до стоимости обслуживания.
Каждый из перечисленных пунктов проверяется в ходе аттестации робота по ГОСТ R 53888-2010, что упрощает ввод в эксплуатацию в рамках ТР ТС 010/2011.
Современные контроллеры работают под открытыми протоколами OPC UA и MTConnect, поэтому легко включаются в цифровой поток MES-систем, фиксируя данные о времени захвата, простоях и фактическом износе инструмента. Встроенные библиотеки ISO G- кода упрощают синхронизацию с уже существующими ЧПУ станками, а функции имитационного моделирования позволяют наладчику обкатить новую траекторию без физического столкновения с ограждением.
Согласно исследованию консалтинговой группы «Роботизация в металлообработке 2023», установка одного семиосевого манипулятора на линию порошковой резки повышает суточный выход деталей на 28 % при неизменной площади цеха. Причина в том, что робот делает подачу и съём без пауз, тогда как оператору требуется не менее 12 секунд на каждую заготовку весом 12-15 кг.
Экономия складывается не только из фондов оплаты труда, но и из уменьшения брака. Когда детали свариваются при фиксированном зазоре ±0,05 мм, остаточные напряжения после охлаждения равномерно распределяются, что сокращает процент исправительного наплавления с 4,3 % до 0,9 %. Дополнительно снижаются компенсационные выплаты по травматизму: термический ожог или травма от падения заготовки фактически исключены.
Для штучных поковок массой до 50 кг достаточно стандартного шестикилограммовика с запасом по моменту на запястье 8-10 Н·м. При работе с матрицами штампов весом 400 кг уже требуется силовой манипулятор с шарнирным плечом и моментом 350-400 Н·м, иначе возрастёт дрейф траектории и износ мехатронного узла.
Загружая детали в две установки, выбирают робот с радиусом не менее 1,8 м и возможностью монтажа на задвижном штативе. Это даёт гибкость при перестройке линии без капитального ремонта фундамента.
Сервоактуаторы переменного тока с абсолютными энкодерами избавляют от «домкрата» при запуске смены: запоминается последнее положение, и не требуется возвращаться в нулевую точку. Плавность хода повышает долговечность шариковинтовых пар на обслуживаемом станке, что подтверждено тестами SKF 2023 года.
Все современные модели оснащаются функцией Power and Force Limiting. При контакте с человеком момент мгновенно сбрасывается до безопасных 150 Н·м, а скорость падает до 250 мм/с, что соответствует требованиям ISO 10218-1. Чтобы получить допуск Ростехнадзора, достаточно оградить рабочую зону сетчатым забором высотой 1,6 м и установить световую индикацию.
Оператору ЧПУ достаточно пройти двухдневный курс переподготовки, чтобы уверенно пользоваться графическим teach-пультом. Для внедрения сложных траекторий рекомендовано обучение технолога вендором робота либо сертифицированными центрами при технических университетах. Среднее время окупаемости инвестиций по опыту предприятий Санкт-Петербургского кластера составляет 18-22 месяца.
Ниже приведён обобщённый пример, иллюстрирующий влияние класса робота на основные показатели производства.
Перед таблицей стоит отметить, что цифры усреднены по данным открытых паспортов оборудования 2022-2023 годов и могут варьироваться в зависимости от конкретной конфигурации.
| Параметр | Лёгкий класс 10 кг | Средний класс 150 кг | Тяжёлый класс 1000 кг |
|---|---|---|---|
| Радиус действия, мм | 1420 | 2650 | 3100 |
| Повторяемость, мм | ±0,02 | ±0,05 | ±0,08 |
| Средний цикл, с | 6 | 11 | 18 |
| Потребляемая мощность, кВт | 1,4 | 4,8 | 9,6 |
| Годовой ОЭП*, % | 78 | 83 | 87 |
* ОЭП — общий эксплуатационный показатель, отражающий соотношение времени полезной работы к календарному.
Эти данные подтверждают, что при возрастании грузоподъёмности робот остаётся энергоэффективным, особенно если сравнивать с мостовыми кранами или позиционерами, требующими минимум 20 кВт непрерывной мощности.
Большинство российских металлообрабатывающих предприятий выбирают роботов Fanuc, Yaskawa и KUKA благодаря высокой сервисной доступности и накопленному парку установленных машин. Fanuc традиционно лидирует по грузоподъёмности, что важно для тяжёлого машиностроения и судостроительных верфей. Yaskawa берет минимальной повторяемостью и скоростью, востребованными в серийном производстве автокомпонентов. KUKA привлекает универсальной кинематикой и максимально открытым ПО, что ценят интеграторы, собирающие гибкие линии для контрактной обработки. Именно эти преимущества определяют выбор: крупные заводы тяжелых корпусов инвестируют в Fanuc, средние серийники комплектуют участки Yaskawa, а проектно-ориентированные площадки с частой переналадкой чаще устанавливают KUKA.